Human-Carrying eVTOL: Landing Gear System
- Organization: VTOL @ Berkeley (President & Lead Mechanical Engineer)
- Relevant Skills: SolidWorks, Fusion360, FAA Compliance, FEA, Carbon-Fiber Design, Materials Optimization, Rapid Prototyping
Background
As President and Lead Mechanical Engineer of VTOL @ Berkeley, I directed the design and development of Berkeley's first human-carrying eVTOL aircraft. This ambitious project required securing industry partnerships and delivering flight-critical systems that met FAA standards. The landing gear system was designed to absorb touchdown loads while minimizing weight—a key constraint for electric vertical takeoff and landing aircraft.
Goals
The landing gear system had to meet stringent requirements:- Support FAA-compliant load cases for safe touchdown and ground operations
- Validate structural integrity under worst-case loading conditions via FEA
- Minimize mass while maintaining safety margins for human flight operations
- Integrate seamlessly with aircraft structure and tiltrotor mechanisms
Design and Execution
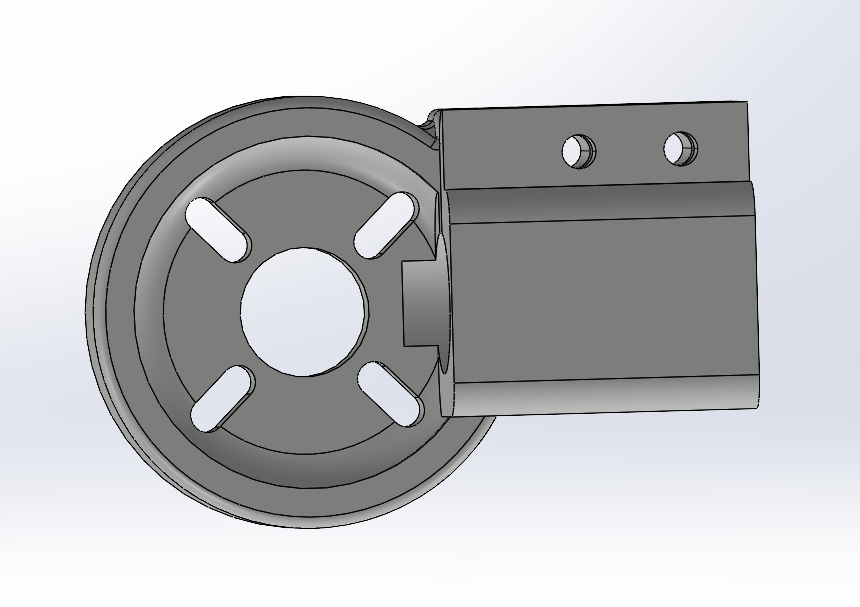
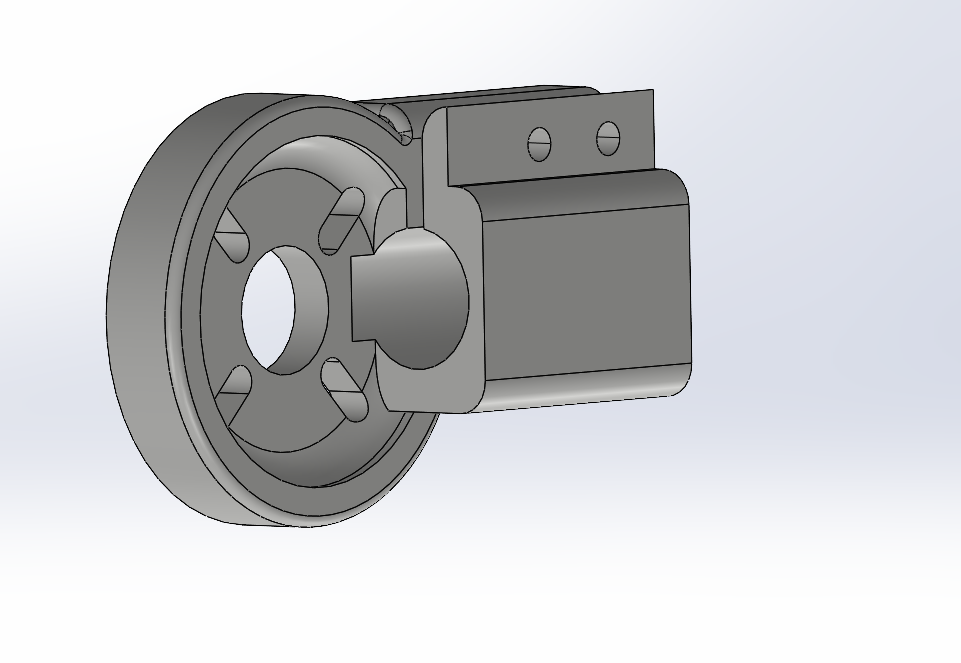
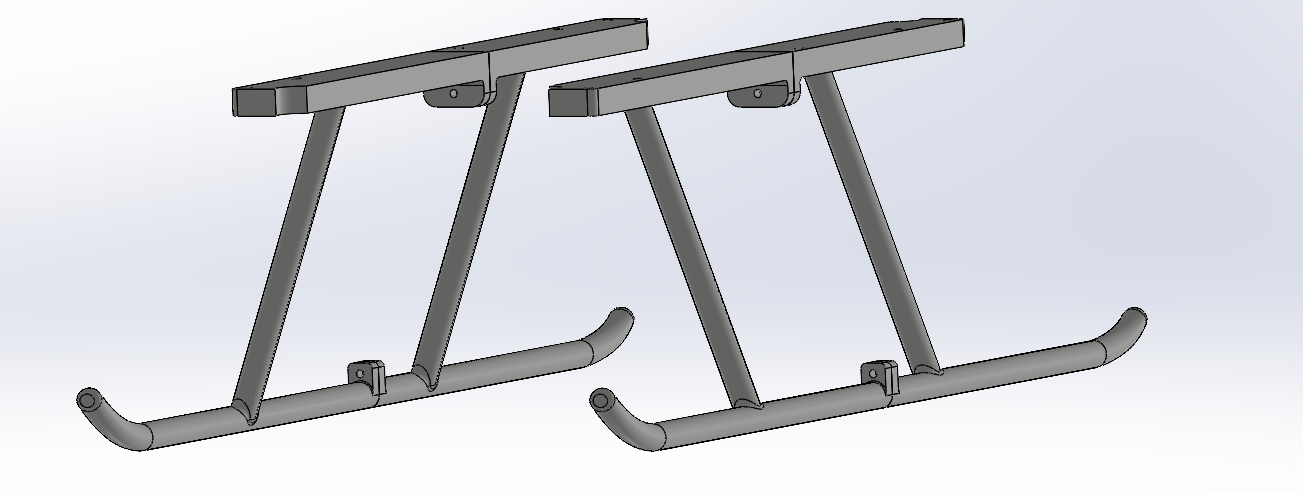
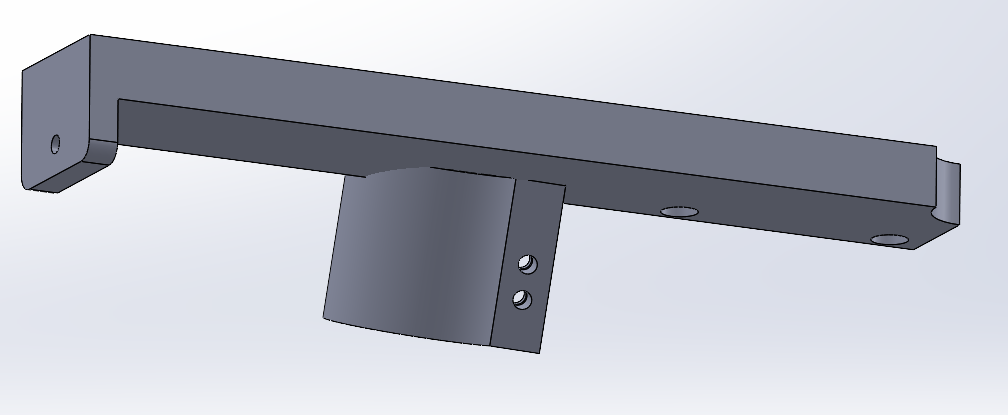
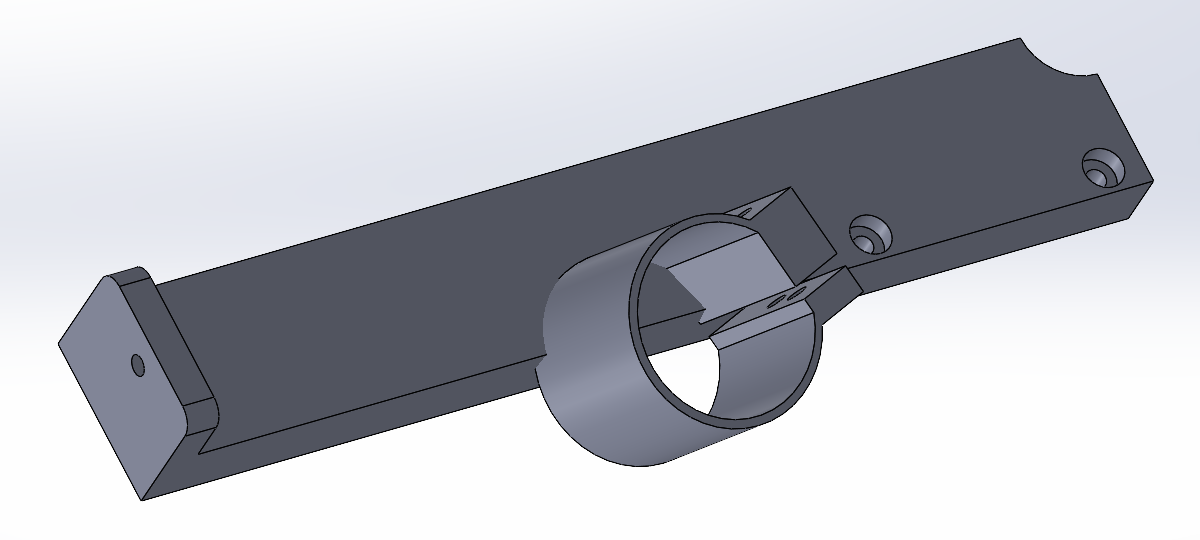
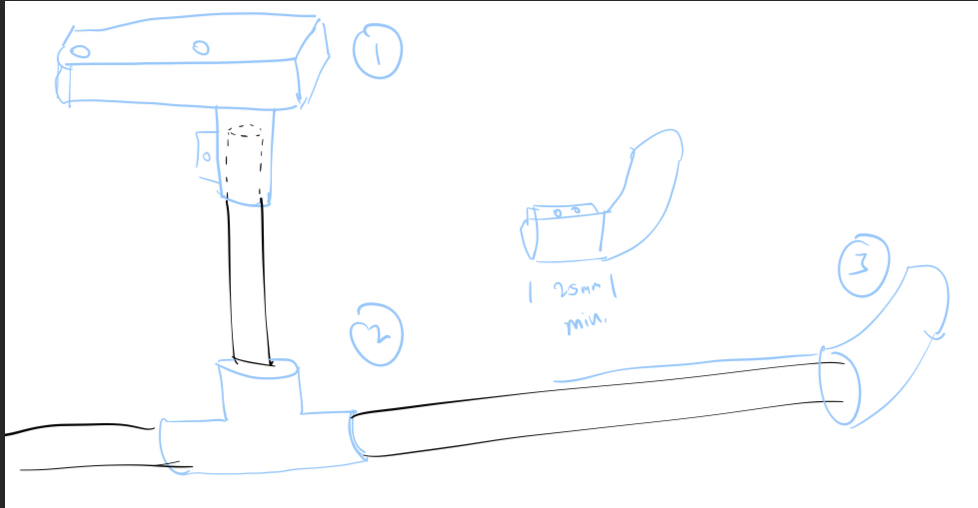
- Landing Gear Skid Design:
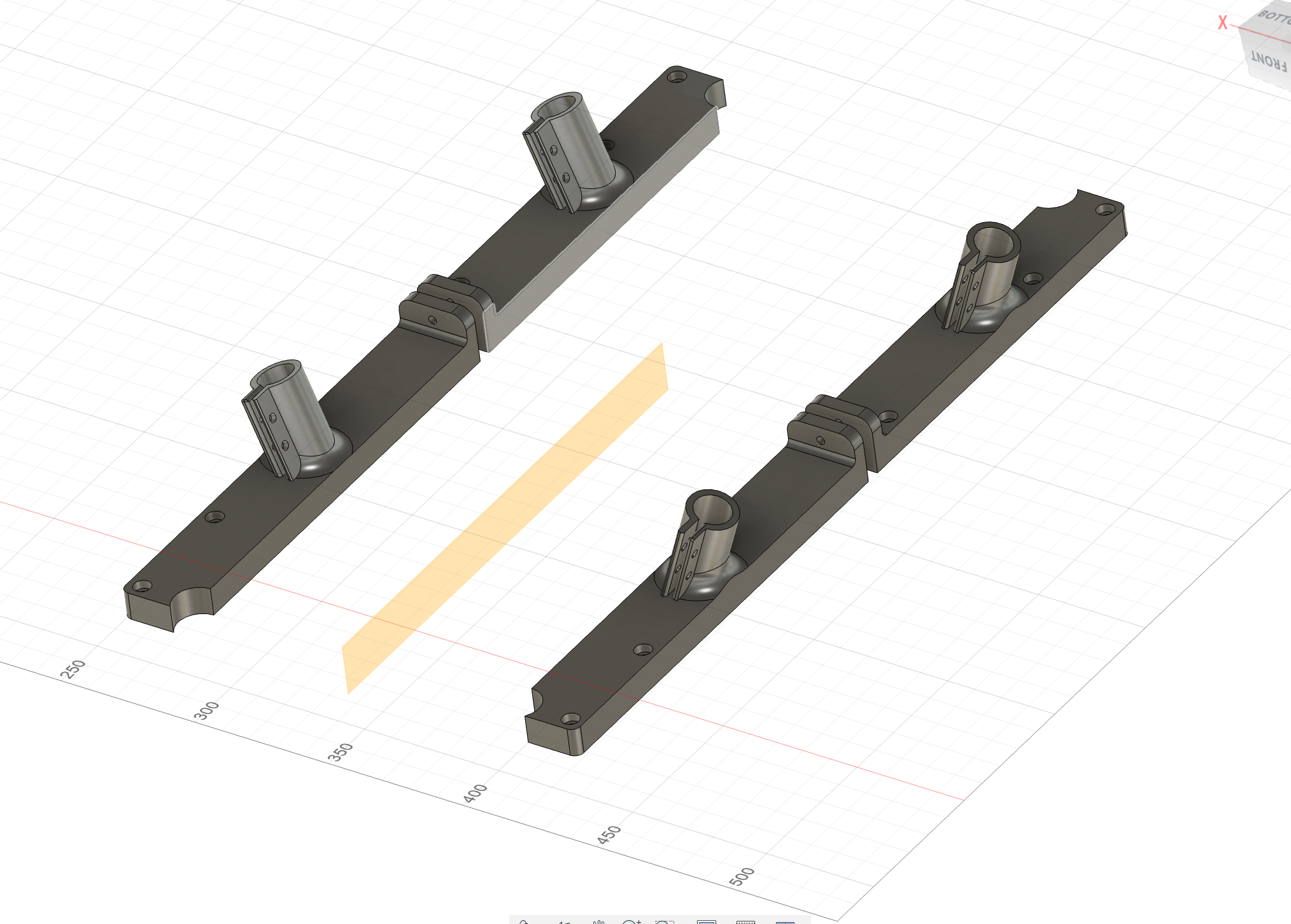
- Designed carbon-fiber landing gear skid with optimized geometry for impact absorption
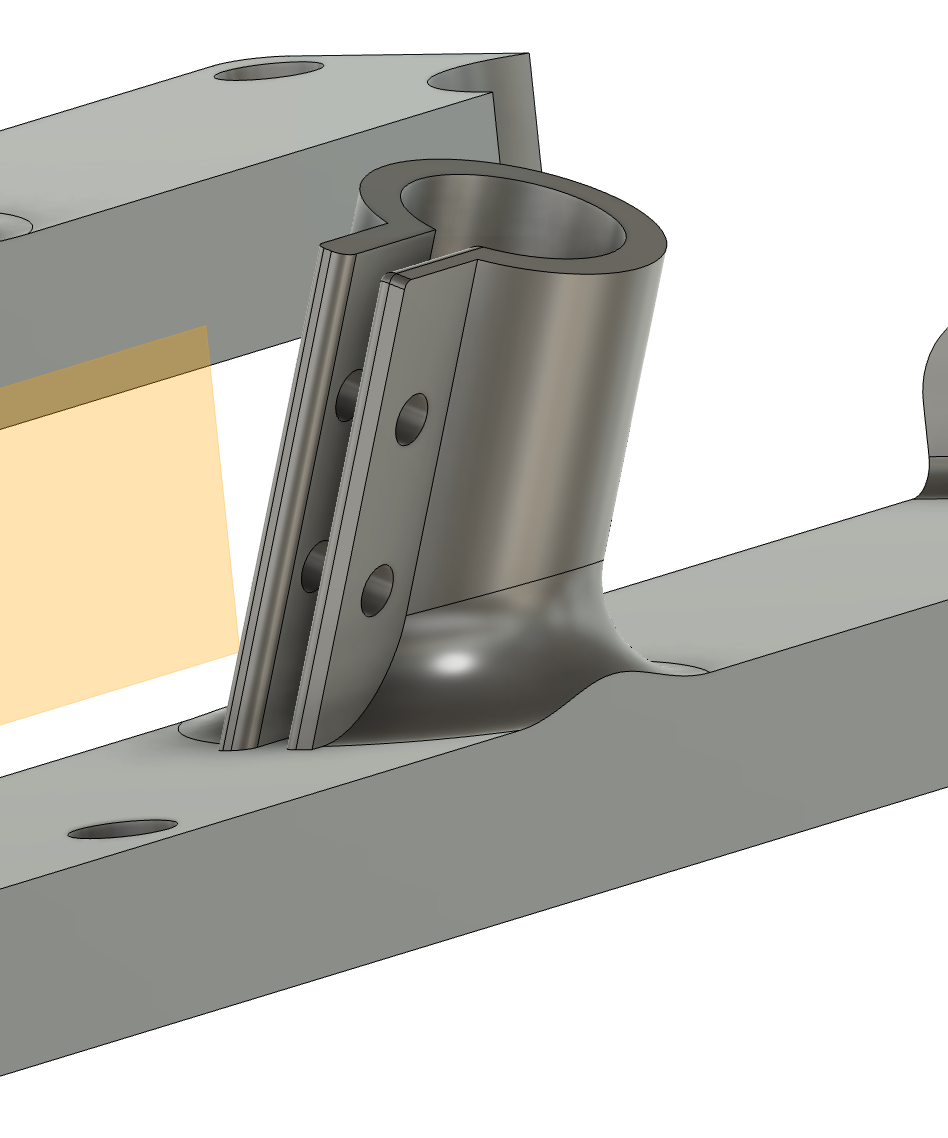
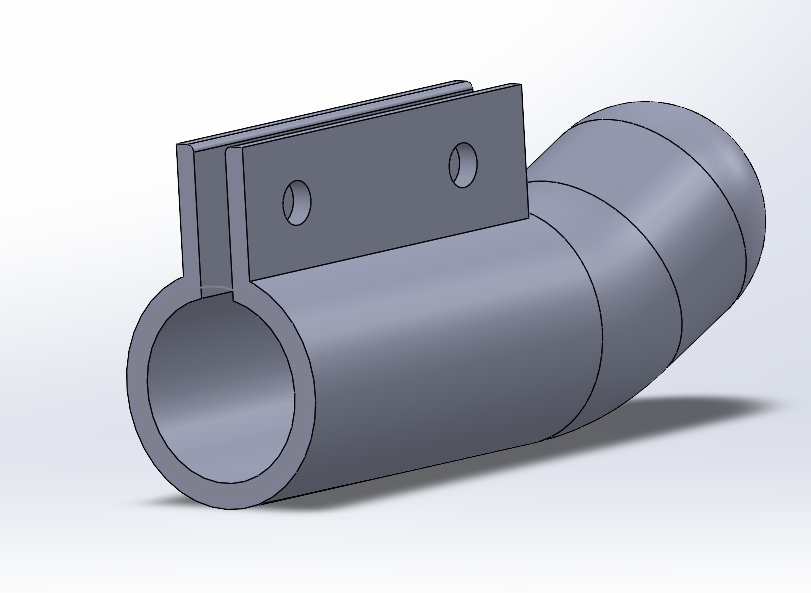
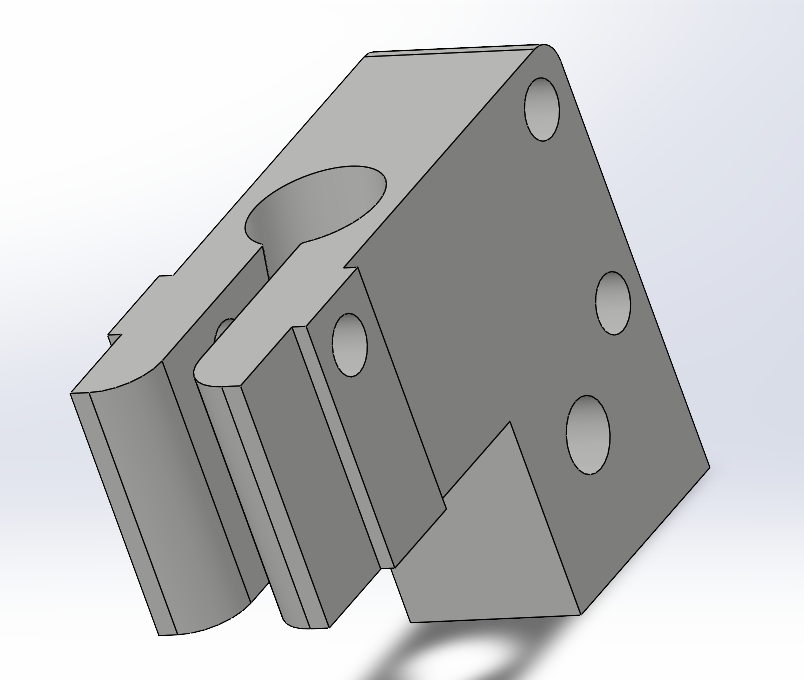
- Developed custom carbon-fiber clamp system to secure skid tubes to main airframe structure
- Created edge sock prototypes to provide smooth, cushioned contact points during landing
- Iterated through multiple prototype versions using 3D printing for rapid testing and validation
- Structural Analysis & Optimization:
- Calculated FAA-compliant load cases including hard landing scenarios (4G vertical acceleration)
- Performed FEA simulations in SolidWorks and Fusion360 to validate component strength
- Optimized carbon-fiber layup schedules to reduce component mass by 15%
- Improved overall aircraft thrust-to-weight ratio through systematic weight reduction
- Manufacturing & Integration:
- Fabricated carbon-fiber components using composite layup techniques
- 3D printed mounting brackets and interface components for assembly integration
- Designed arm mounts to attach landing gear assembly to main fuselage structure
- Conducted ground testing to verify load distribution and structural integrity
Outcome
- Successfully designed FAA-compliant landing gear system for human-carrying eVTOL
- Achieved 15% mass reduction in carbon-fiber structures through optimization
- Validated structural performance under worst-case load conditions via FEA
- Improved aircraft thrust-to-weight efficiency, enabling longer flight endurance
- Delivered flight-ready landing gear system integrated with tiltrotor mechanisms
Image Gallery (Click to zoom):


Custom Tiltrotor UAV
- Relevant Skills: Aerodynamic Design, Ansys CFD, ArduPilot Configuration, 3D Printing (PLA Aero), Carbon-Fiber Fabrication, Flight Testing
Background
Tiltrotor UAVs combine the efficiency of fixed-wing cruise flight with the vertical takeoff capability of multirotor systems. I led the mechanical and aerodynamic design of a custom tiltrotor UAV, defining the complete airframe geometry and controls architecture. The aircraft features a trimotor configuration with two tilting front motors and one fixed rear motor, enabling smooth hover-to-cruise transitions.
Goals
- Design complete airframe geometry optimized for both hover and cruise flight regimes
- Minimize rotor wake interference and aerodynamic drag through simulation-driven design
- Develop stable flight control system capable of autonomous hover-to-cruise transitions
- Fabricate lightweight, robust structure using advanced manufacturing techniques
Design and Execution
- Airframe & Aerodynamics:
- Defined airframe geometry with 1340mm wingspan and modular construction for easy transport
- Selected Eppler E205 airfoil for optimal low-speed efficiency and stability
- Optimized rotor placement via Ansys CFD simulations to reduce wake interference between motors
- Minimized drag through careful fairing design and clean integration of tiltrotor mechanisms
- Achieved zero pitching moment at cruise conditions through precise center-of-gravity placement
- Tiltrotor Mechanisms:
- Designed and fabricated servo-actuated tilt mechanisms for front motors (0-90° range)
- Integrated carbon-fiber booms and PETG motor mounts for structural rigidity
- Optimized blade geometry and pitch settings for efficient thrust in both hover and cruise
- Validated mechanical strength under operational loads using FEA analysis
- Manufacturing & Assembly:
- 3D printed airframe components using lightweight PLA Aero filament with cubic subdivision infill
- Fabricated carbon-fiber spars and structural tubes for primary load paths
- Assembled modular wing sections with integrated cable routing for clean installation
- Installed T-Motor F90 1300KV motors with 7-inch propellers for optimal thrust efficiency
- Flight Controls & Testing:
- Configured ArduPilot flight controller for tricopter VTOL operation
- Tuned transition parameters (Q_TILT_RATE, Q_TRANSITION_MS) for smooth mode changes
- Implemented vectored yaw control through differential motor tilting (±15° yaw authority)
- Conducted flight testing to validate hover stability and cruise performance
- Achieved stable autonomous transitions with 4+ hour endurance on 4S Li-Ion battery
Outcome
- Successfully developed custom tiltrotor UAV with complete airframe and controls integration
- Achieved stable hover-to-cruise transitions through optimized ArduPilot tuning
- Validated aerodynamic performance through CFD analysis and flight testing
- Demonstrated 4+ hour flight endurance with efficient cruise performance at 60-70 km/h
- Created modular, manufacturable design suitable for various mission payloads
Image Gallery (Click to zoom):